Как работает бионический протез руки: принципы, технологии и практическое применение
Бионические протезы руки — это сложные кибернетические устройства, восстанавливающие утраченные функции конечности. В статье подробно разобраны принципы их работы, компоненты, процесс управления и обучения, а также представлен обзор современных моделей. Узнайте, как технологии позволяют вернуть естественные движения.
Как бионический протез руки распознает намерения пользователя?
Бионические протезы руки преобразуют остаточные мышечные сигналы в точные механические движения. Современные системы используют электромиографию для регистрации электрической активности мышц культи.
При сокращении мышц культи возникают микровольтовые электрические сигналы, которые улавливаются поверхностными электродами протеза. Эти сигналы усиливаются, фильтруются от помех и передаются в микропроцессорную систему управления. Современные алгоритмы машинного обучения анализируют сигнальные паттерны, выделяя характерные особенности для различных типов движений.
При первом использовании протеза требуется калибровка, когда система "изучает" уникальные сигнатуры мышечной активности пользователя. Регулярные 15-минутные тренировки в первые недели значительно улучшают точность распознавания.
Модели премиум-класса, такие как BeBionic или Michelangelo, используют мультиполярные электродные матрицы, которые снимают сигналы с нескольких точек одновременно. Это позволяет различать до 14 различных типов движений с точностью выше 95%. Процессоры на базе ARM Cortex-M7 обрабатывают сигналы с задержкой менее 100 миллисекунд, обеспечивая практически мгновенную реакцию на мысленную команду.
Какие биосигналы используются для управления протезом?
Основным сигналом для управления бионическими протезами являются электромиографические потенциалы, возникающие при сокращении остаточных мышц культи.
Кроме ЭМГ-сигналов, современные системы используют дополнительные сенсорные данные. Акселерометры и гироскопы определяют ориентацию конечности в пространстве, что позволяет автоматически адаптировать силу захвата в зависимости от положения руки. Датчики давления в пальцах протеза измеряют силу взаимодействия с объектами, предотвращая повреждение хрупких предметов. В экспериментальных моделях используются инвазивные нейроинтерфейсы, непосредственно считывающие сигналы с периферических нервов, но такие системы пока не получили клинического распространения.
Как электромиография (ЭМГ) преобразует мышечные импульсы в команды?
Электромиография преобразует электрическую активность мышц в цифровые команды для управления протезом через многоступенчатый процесс обработки сигналов.
Сигналы с электродов проходят предварительную обработку: усиливаются до уровня 5-10 В, фильтруются от сетевых помех 50/60 Гц и высокочастотного шума. Затем происходит выделение информативных признаков — амплитуды, частоты, формы сигнала. Современные системы используют алгоритмы на основе искусственных нейронных сетей, обученные распознавать паттерны для конкретных движений. После классификации сигнала процессор генерирует управляющие команды для сервоприводов, контролирующих скорость и силу движения. Такие компании как Ottobock и Touch Bionics разработали самообучающиеся алгоритмы, которые адаптируются к изменениям мышечной активности пользователя в течение времени.
Ключевой принцип
Бионический протез не читает мысли, а реагирует на электрические сигналы, возникающие при сознательном напряжении конкретных групп мышц культи. Каждому движению соответствует уникальный "паттерн" мышечной активности.
Устройство бионического протеза руки: ключевые компоненты и материалы
Современный бионический протез руки состоит из модульной системы взаимозаменяемых компонентов, объединенных в единую кибернетическую конструкцию.
Основу составляет каркас из углепластика или аэрокосмического алюминиевого сплава, обеспечивающий прочность при минимальном весе. Внутри размещаются микропроцессорный блок управления, литий-ионные аккумуляторы емкостью 2000-4000 мАч и сервоприводы. Силовые приводы на основе бесщеточных двигателей постоянного тока преобразуют электрическую энергию в механическое движение через планетарные редукторы. На поверхность культеприемника устанавливаются миоэлектрические датчики, которые могут быть интегрированы в силиконовую вставку для улучшения контакта с кожей.
Микропроцессорный блок
Современные протезы используют 32-битные процессоры ARM Cortex с тактовой частотой до 600 МГц, способные обрабатывать до 1000 команд в секунду с энергопотреблением менее 0.5 Вт.
Силовые приводы
Бесщеточные двигатели мощностью 15-30 Вт обеспечивают усилие захвата до 100 Н, что позволяет удерживать предметы весом до 10 кг.
Энергосистема
Литий-полимерные аккумуляторы емкостью 2200-4400 мАч обеспечивают работу протеза в течение 12-18 часов активного использования.
Какие материалы обеспечивают прочность и легкость современных протезов?
Современные бионические протезы используют комбинацию материалов, обеспечивающих оптимальное соотношение прочности, веса и биосовместимости.
Каркасные элементы изготавливаются из углепластика (CFRP) или титановых сплавов Grade 5, что обеспечивает высокую прочность при массе 300-500 г для всего протеза. Наружные панели выполняются из термопластичного полиуретана с добавлением нейлона, что позволяет создавать эстетичные поверхности, устойчивые к ударам и царапинам. Силиконовые покрытия в зоне контакта с кожей обеспечивают комфорт и предотвращают раздражение. Для шарниров и ответственных соединений применяются закаленные стальные сплавы с антикоррозийным покрытием. Такие компании как Open Bionics используют 3D-печать из нейлоновых порошков, что позволяет создавать полностью индивидуальные конструкции с точностью до 0.1 мм.
Как работают миоэлектрические датчики и процессоры управления?
Миоэлектрические датчики и процессоры управления образуют кибернетический контур, преобразующий биологические сигналы в механические движения.
Электроды Ag/AgCl с проводящим гелем улавливают электрические потенциалы от 50 до 5000 мкВ с поверхности кожи. Сигналы усиливаются дифференциальными усилителями с коэффициентом усиления 1000-5000, что компенсирует затухание в тканях. Аналогово-цифровые преобразователи оцифровывают сигнал с частотой дискретизации 1-2 кГц. Цифровые сигнальные процессоры реализуют алгоритмы распознавания образцов, включая анализ во временной и частотной областях. Современные системы используют адаптивные алгоритмы, которые постоянно подстраиваются под изменения мышечной активности пользователя. Процессоры таких протезов как i-Limb Quantum могут параллельно обрабатывать сигналы с 8 электродов, распознавая до 36 различных жестов с точностью 98%.
Схема обработки сигналов в бионическом протезе
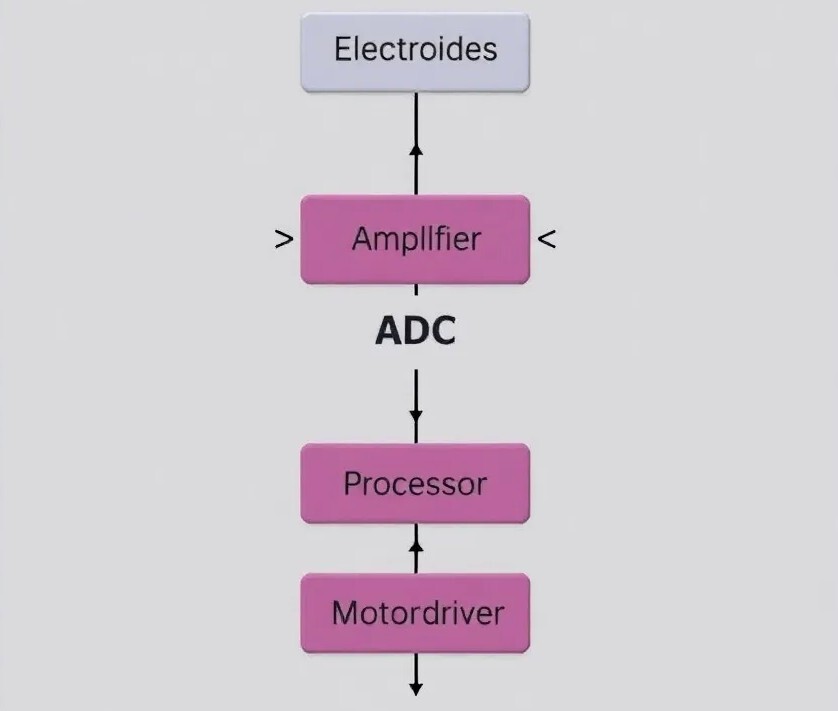
Типичная архитектура системы управления бионическим протезом руки. Современные процессоры выполняют до 10 миллионов операций в секунду для преобразования мышечных сигналов в плавные движения.
Система управления и обратная связь в бионических протезах
Управление современным бионическим протезом осуществляется через комбинацию интуитивных интерфейсов и систем обратной связи, создающих замкнутый кибернетический контур.
Основной метод управления — избирательная активация различных групп мышц культи. Например, одновременное сокращение сгибателей и разгибателей может переключать режимы работы. Дополнительные элементы управления включают инерционные датчики для позиционирования всей руки, тактильные сенсоры на пальцах для регулировки силы захвата и мобильные приложения для тонкой настройки параметров. Системы обратной связи используют вибрационные моторы, обеспечивающие тактильные ощущения при контакте с объектами, и визуальную индикацию на самом протезе или в сопряженном смартфоне.
Для освоения сложных движений рекомендую начинать с простых упражнений — открытие/закрытие кисти, удержание легких предметов. Только после закрепления базовых навыков переходите к комбинированным действиям, таким как поворот запястья с одновременным захватом.
Как пользователь управляет различными типами захватов и движений?
Пользователь выбирает различные типы захватов и движений через последовательность мышечных активаций, которые система распознает как команды переключения режимов.
Современные протезы предлагают 5-12 предустановленных паттернов движений: силовой захват, точный захват, ключевой захват, сведение пальцев, крюкообразный захват. Переключение между режимами осуществляется двойным сокращением определенной мышцы или комбинацией сигналов. Например, в протезах BeBionic сокращение бицепса активирует открытие кисти, а трицепса — закрытие. Одновременное сокращение обеих мышц переключает режимы. Для сложных движений, таких как вращение запястья при удержании объекта, система автоматически координирует работу нескольких двигателей, распределяя нагрузку и обеспечивая плавность.
Существует ли тактильная обратная связь в бионических протезах?
Современные бионические протезы оснащаются системами тактильной обратной связи, передающими пользователю информацию о силе захвата и контакте с объектами.
Системы обратной связи используют различные технологии: пропорциональная вибрация, где интенсивность вибрации соответствует приложенной силе; электротактильная стимуляция, передающая слабые электрические импульсы на кожу; механическое давление через пневматические элементы. Например, протез Hero Arm от Open Bionics использует вибромоторы в культеприемнике, которые активируются при контакте пальцев протеза с объектом. Экспериментальные системы, такие как LUKE Arm от DEKA, обеспечивают проприоцептивную обратворную связь, создавая ощущение положения искусственной конечности в пространстве. Однако полноценная тактильная чувствительность, сравнимая с биологической рукой, остается технологической задачей для следующих поколений протезов.
Обучение, калибровка и адаптация под пользователя
Эффективное использование бионического протеза требует периода обучения и регулярной калибровки системы под индивидуальные особенности пользователя.
Первичная настройка протеза занимает 3-5 сеансов по 60-90 минут с участием ортопеда-протезиста. На этом этапе создается цифровой профиль мышечных сигналов пользователя, настраивается чувствительность электродов, подбираются оптимальные режимы работы. Последующее обучение включает ежедневные 20-30 минутные тренировки в течение 4-8 недель, в ходе которых пользователь осваивает контроль над различными типами захватов. Современные системы оснащены мобильными приложениями с обучающими программами и играми, помогающими развивать мышечный контроль. Частота повторной калибровки зависит от изменений объема культи и мышечной активности, обычно составляя 1 раз в 6-12 месяцев.
Сколько времени занимает обучение использованию бионического протеза?
Базовое обучение управлению бионическим протезом занимает 4-8 недель при ежедневных тренировках по 20-40 минут.
Первые успехи появляются уже через 3-5 дней — пользователь осваивает открытие и закрытие кисти. Через 2-3 недели достигается уверенное выполнение простых бытовых действий: удержание столовых приборов, открытие дверей. Полное освоение всех функций протеза занимает 2-4 месяца, в зависимости от сложности системы и индивидуальных особенностей. Дети осваивают протезы быстрее взрослых — за 6-8 недель, благодаря высокой нейропластичности. Важную роль играют современные обучающие системы с биологической обратной связью, которые визуализируют мышечную активность и помогают вырабатывать четкие сигналы. Клинические исследования Ottobock показали, что использование таких систем сокращает время обучения на 30-40%.
Как настроить протез под индивидуальные анатомические особенности и потребности?
Индивидуальная настройка бионического протеза включает анатомическую адаптацию культеприемника и персонализацию программного обеспечения под функциональные потребности пользователя.
Культеприемник изготавливается по 3D-скану культи с использованием силиконовых вкладышей, обеспечивающих равномерное распределение давления. Миоэлектрические электроды позиционируются в местах максимальной амплитуды сигналов, что определяется в процессе примерки. В программном обеспечении настраивается чувствительность сенсоров, скорость движений, сила захвата и последовательность режимов работы. Для профессиональных нужд создаются пользовательские профили — например, "рабочий" с усиленным захватом или "музыкант" с тонкой моторикой. Такие компании как COVVI предлагают облачные платформы, где пользователи могут сохранять и обмениваться настройками, адаптированными под конкретные задачи.
При изменении веса более чем на 5% или появлении дискомфорта обязательно проведите повторную калибровку. Незначительные изменения объема культи могут существенно влиять на качество сигнала и точность управления.
Техническое обслуживание, зарядка и устранение неисправностей
Правильное обслуживание бионического протеза обеспечивает его долговечность и бесперебойную работу, требуя регулярного ухода и соблюдения эксплуатационных процедур.
Ежедневное обслуживание включает очистку силиконовых элементов изопропиловым спиртом и проверку контактов электродов. Аккумуляторы заряжаются в ночное время с использованием оригинальных зарядных устройств, что обеспечивает 12-16 часов автономной работы. Раз в месяц требуется полная диагностика системы через фирменное программное обеспечение, проверка крепежных элементов и смазка движущихся частей силиконовой смазкой. Гарантийное обслуживание проводится в авторизованных центрах каждые 6-12 месяцев, включая диагностику электроники, замену изношенных компонентов и обновление программного обеспечения.
Как правильно заряжать и хранить бионический протез?
Зарядка литий-ионных аккумуляторов бионического протеза требует соблюдения специфических правил для обеспечения максимального срока службы элементов питания.
Производители рекомендуют использовать только оригинальные зарядные устройства с выходным напряжением 8.4V и током 1.5-2A. Полная зарядка занимает 2-4 часа, при этом не следует оставлять протез на зарядке более 8 часов. Оптимальный диапазон заряда — 20-80%, полные разряды допустимы не чаще 1 раза в месяц для калибровки контроллера. При длительном хранении (более 1 месяца) аккумулятор следует зарядить до 50% и хранить при температуре 10-25°C. Современные системы, такие как в Michelangelo Hand, оснащены интеллектуальными контроллерами заряда, которые оптимизируют процесс и продлевают срок службы батарей до 500 циклов с сохранением 80% емкости.
Какие неисправности чаще всего возникают и как их решать?
Наиболее частые неисправности бионических протезов связаны с электродной системой, источниками питания и механическими компонентами, многие из которых могут быть устранены пользователем.
Проблемы с распознаванием сигналов обычно вызваны плохим контактом электродов — решение включает очистку кожи и электродов, замену проводящего геля. Быстрый разряд батареи часто связан с холодной погодой или старением аккумулятора — рекомендуется использование термочехлов и замена батареи после 2 лет эксплуатации. Механические заедания в суставах устраняются очисткой от загрязнений и нанесением силиконовой смазки. При программных сбоях помогает перезагрузка системы путем извлечения аккумулятора на 60 секунд. Если простые меры не устраняют проблему, необходимо обратиться в сервисный центр для диагностики с использованием специализированного оборудования.
Сравнение характеристик современных бионических протезов руки (2025)
| Модель | Степени свободы | Время работы (часы) | Вес (г) | Сила захвата (Н) | Примерная стоимость (руб) |
|---|---|---|---|---|---|
| Ottobock Michelangelo | 7 | 14-16 | 550 | 100 | 2 800 000 |
| Touch Bionics i-Limb Quantum | 6 | 12-14 | 520 | 85 | 2 600 000 |
| Open Bionics Hero Arm | 5 | 10-12 | 450 | 70 | 1 900 000 |
| COVVI Nexus | 6 | 16-18 | 580 | 95 | 3 100 000 |
Сравнение бионических протезов с альтернативными решениями
Бионические протезы существенно превосходят механические и косметические аналоги по функциональности, но требуют более сложного обслуживания и имеют высокую стоимость.
По сравнению с тяговыми механическими протезами, бионические системы обеспечивают более естественные движения без необходимости использования здоровой руки для управления. Они позволяют выполнять сложные манипуляции с переменным усилием захвата и позиционированием пальцев независимо. Косметические протезы выигрывают по эстетике и весу, но полностью лишены функциональности. Экспериментальные нейроинтерфейсные системы пока не могут конкурировать по надежности и доступности, хотя и обедают более интуитивное управление. При выборе типа протеза учитывают образ жизни, профессию, уровень ампутации и финансовые возможности — современный рынок предлагает решения от базовых функциональных моделей до премиальных кибернетических систем.
Чем бионический протез превосходит механические и косметические аналоги?
Бионические протезы превосходят механические аналоги по точности управления, функциональности и естественности движений, а косметические — по практической полезности.
Ключевое преимущество — пропорциональное управление, когда скорость и сила движений зависят от интенсивности мышечного сигнала. Это позволяет плавно регулировать силу захвата от нескольких граммов до килограммов. Бионические системы поддерживают несколько независимых движений — например, одновременное вращение запястья и сгибание пальцев, что недоступно механическим протезам. Современные модели обеспечивают до 14 различных типов захватов, адаптированных под конкретные задачи. Эстетически бионические протезы приближаются к косметическим за счет реалистичных силиконовых покрытий и анатомического дизайна, сохраняя полную функциональность.
Технические характеристики типичного бионического протеза руки
| Компонент | Материал | Функция | Срок службы |
|---|---|---|---|
| Каркас | Углепластик, титановый сплав | Несущая конструкция | 7-10 лет |
| Микропроцессор | Кремний, герметичный корпус | Обработка сигналов | 5-7 лет |
| Сервоприводы | Бесщеточные двигатели, стальные шестерни | Преобразование электричества в движение | 3-5 лет |
| Аккумулятор | Литий-полимерный | Электроснабжение | 2-3 года |
| Электроды | Ag/AgCl с гелевым покрытием | Регистрация мышечных сигналов | 6-12 месяцев |
| Наружные панели | Термопластичный полиуретан | Эстетика, защита | 3-5 лет |
Какие модели бионических протезов лидируют на рынке в 2025 году?
В 2025 году лидерство на рынке бионических протезов руки удерживают продукты Ottobock, Touch Bionics, COVVI и Open Bionics, каждая со своими технологическими преимуществами.
Ottobock Michelangelo отличается революционной кинематикой запястья, обеспечивающей естественное вращение с 50° супинации и 50° пронации. Модель i-Limb Quantum от Touch Bionics предлагает уникальную систему индивидуально управляемых пальцев с 24 позициями. Британская разработка COVVI Nexus обладает самой совершенной системой обратной связи, передающей информацию о силе захвата и текстуре объектов. Hero Arm от Open Bionics стал лидером по доступности и кастомизации, предлагая детские размеры и персонализированный дизайн по цене на 30% ниже конкурентов. Российские разработки, такие как "Моторика", активно развиваются, но пока уступают международным лидерам по функциональности и надежности.
Возможности и ограничения современных бионических протезов руки
Современные бионические протезы руки позволяют выполнять большинство повседневных задач, но имеют технологические ограничения в точности мелкой моторики и сенсорной обратной связи.
Пользователи успешно справляются с такими действиями как прием пищи с использованием столовых приборов, письмо ручкой, набор текста на клавиатуре, открывание дверей, удержание мелких предметов. Профессиональное применение включает работу с инструментами, управление транспортом, занятия многими видами спорта. Ограничения касаются действий, требующих экстремальной силы (более 15 кг) или сверхтонкой моторики (шитье, микроэлектроника). Отсутствие температурной чувствительности и ограниченная тактильная обратная связь затрудняют манипуляции с хрупкими и горячими предметами. Энергетические ограничения требуют ежедневной зарядки, а воздействие воды и экстремальных температур может повредить электронику.
Какие действия можно выполнять с помощью бионической руки?
Современные бионические протезы позволяют выполнять более 80% бытовых и профессиональных действий, доступных биологической руке.
Базовые функции включают захват и удержание предметов различной формы и веса — от яйца до 5-килограммовой сумки. Пользователи могут открывать двери поворотом ручки, использовать ключи, держать столовые приборы, писать ручкой, набирать текст на клавиатуре. Спортивные возможности включают плавание со специальными водозащитными чехлами, езду на велосипеде, скалолазание, тяжелую атлетику до 50 кг. Профессиональное применение охватывает множество специальностей — от работы с компьютером до управления строительной техникой. Клинические исследования DEKA показали, что 92% пользователей бионических рук возвращаются к своей прежней профессии или осваивают новую.
Какие функции остаются недоступными для современных бионических протезов?
Несмотря на впечатляющий прогресс, современные бионические протезы не могут полностью воспроизвести все функции биологической руки, особенно в сфере сенсорики и тонкой моторики.
Ключевые ограничения включают отсутствие температурной чувствительности, что создает риск ожогов при контакте с горячими предметами. Тактильная обратная связь остается примитивной — пользователь не может различать текстуры или точно определять силу сжатия без визуального контроля. Тонкие манипуляции, требующие независимого управления каждым фалангом пальцев (игра на фортепиано, хирургические операции), недоступны даже самым продвинутым системам. Бионические руки не обеспечивают полную силу биологической руки — максимальное усилие захвата составляет 100 Н против 400 Н у взрослого мужчины. Другие ограничения включают зависимость от источников питания, уязвимость к влаге и необходимость регулярного обслуживания.
